День 4: Важность пакетной нормализации
Для какой цели существуют нейронные сети? Нейронные сети - это обучаемые модели. Их главная цель - приблизиться или даже превзойти человеческие способности восприятия. Ричард Суттон говорит, что самый большой уро, который может быть получен с 70 годов разработки ИИ, в том, что общие методы использующие вычисления очень эффективны. В его эссе, Суттон говорит, что только модели без зашифрованного человеческого знания могут превзойти человеко-ориентированные подходы. Так, что нейронные сети в общем будут достаточны для использования вычислений. Затем, не удивительно, что они могут выставить миллионы обучаемых степеней свободы.
Самый большой вызов для нейронных сетей: 1) как обучить эти миллионы параметров, 2) как их интерпритировать. Пакетная нормализация(batchnorm) был представлен в качестве попытки сделать обучение еще эффективнее. Метод может сильно сократить число итераций обучения. Даже больше, batchnorm - возможо является ключем, который даст возможность обучать определенные архитектуры такие как бинарная нейронная сеть. Наконец, batchnorm одна из самых последних преимуществ нейронной сети.
Пакетная нормализация в кратце
Что такие пакет? До сих пор, вы смотрели на игрущечные наборы данных. Они были настолько малы, что могли быть легко помещены в память. Однако, в реальности существует огромные наборы занимающие сотни гигабайтов памяти, такие как Imagenet. Они часто не помещаются в память. В этом случае, имеет смысл разделить наборы данных в маленькие пакеты. Во время обучения обрабатывается только один пакет.
Как предполагает имя, batchnorm преобразование это действие над отдельными пакетами данных. Вывод линейного слоя может быть причиной деградации активационной функции. Например: в случае ReLU f(x)=max(0,x) активация, все негативные значения будут приводить к нулевой активации. Отсюда, хорошая идея - нормализовать эти значения с помощью вычитания среднего μ пакета. Похожим образом, деление по стандартному отклоненю √var масштабирует амплитуту, которая особенно выгодня для активация сигмоидного вида.
Обучение и Batchnorm
Процеедура пакетной нормализации имеет отличия на этапах обучения и вывода. Во время обучения, каждый слой, где мы хотим применить batchnorm, сначала вычисляем средний мини пакет:
 где
где Xi это i вектор-свойство идущий из прошлого слоя; i=1…m, где m>1 это размер пакета. Так же получаем ди:сперсию для пакета
Теперь batchnorm ядро, сама нормализация:
 где маленькая постоянная
где маленькая постоянная ϵ добавляет числовую стабильность. Что если нормализация данного слоя была вредна? Алгоритм предоставит два обучаемых параметра, которые в худшем случае могут отменить эффект пакетной нормализации: смасштабирует параметр γ и увеличит β. После применения таковых мы получим вывод слоя batchnorm:
 Отметим, что оба: среднее значениее
Отметим, что оба: среднее значениее μ и распределение var векторы количество которых такое же большое как и нейронов в данном скрытом слое. Оператор ∗ говорит о поэлементном умножении.
Вывод
В стадии вывода лучше всего иметь одну выборку данных за раз. Как же сосчитать среднюю величину пакета если целый пакет это и есть выборка данных? Для правильной обраотки, во время обучения мы указываем среднее значение и распределение (E[X] and Var[X]) для всех наборов обучения. Эти вектора заменят μиvar` во время вывода, таким образом избегая проблемы нормализации единичного пакета.
Насколько эффективен Batchnorm

SoДо farэтого weмомента haveмы playedуспели withпоиграться tasksс thatзадачами, providedкоторые low-dimensionalпредоставляют inputсвойство features.низкоразмерного Now,ввода. weТеперь, areмы goingсобираемся toпротестировать testнейронную neuralсеть networksпроблемой onпо aсерьезнее. bitМы moreприменим interestingнаши challenge.навыки Weдля willавтоматического applyраспознавания ourнаписанных skillsчеловеком toцифр automaticallyна recognizeоснове human-written digits on a famousизвестного MNIST dataset.набора Thisданных. challengeЭта cameпроблем fromпоявляется theв needследствии toнужды haveчтения zip-codeкодов machineс readingконветов forна more efficient postal services.почте.
WeМы constructсоздадим twoдве neuralнейронные networks,сети, eachкаждая havingбдует twoиметь fully-connectedдва hiddenполностью layersсвязанных скрытых слоя (300 andи 50 neurons)нейронов). BothОбе networksсети receiveполучают картинку размером 28×28=784 inputs,пикселей, theи number of image pixels, and give backвозвращает 10 outputs,чисел, theраспознанное numberчисло. ofДля recognizedвнутненних classesслоев (digits).мы Asбудем in-between layer activations we applyиспользовать ReLU f(x)=max(0,x). ToДля obtainполучения theвозможных classificationклассификаторов probabilitiesвектора vectorв inрезультате, theв result,качестве weфункции useактивации softmaxмы activationбудем использовать 
. OneОдна ofиз theсетей networksв inдополнение additionбудет performsпроизводить batchпакетную normalizationнормализацию beforeперед ReLUs.ReLU. Then,Затем, weмы trainбудем thoseобучать usingих stochasticиспользую gradientстохастический descent2градиентный withспуск learningс rateкоэфиициентом обучения α=0.01^3 andи batchразмером sizeпакета m=100.
Neural
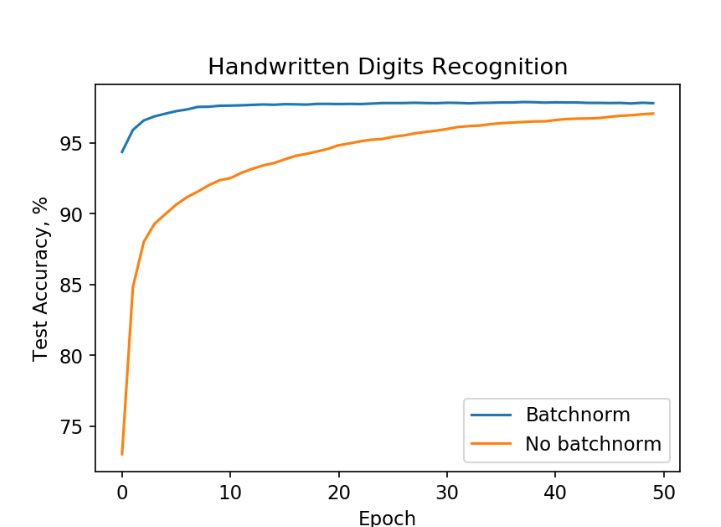
Обучение networkнейронной trainingсети onна MNIST data.данных.
Обучение withс batchnormпомощью пакетной нормализации (blue)синий leadsграфик) toведет highк accuraciesвысокой fasterточности thanбыстрее withoutчем batchnormбез (orange)нее(ораньжевый график).
FromИз theграфика figureмы aboveвидим, weчто seeнейронная thatсеть theс neuralпакетной networkнормализацией withдостикает batchточности normalizationв reaches98% aboutза 9810 %accuracyгде inвторой tenпыатеся epochs,сделать whereasэто theв otherтечении one50!Похожие isрезультаты strugglingмогут toбыть reachполучены comparableдругими performance in fifty epochs! Similar results can be obtained for other architectures.архитектурами.
ItНадо isупомянуть, worthчто mentioningмы thatдо weсих stillпор mayможет lackслабо understandingнедостаточно howпонимать exactlyкак doesименно batchnorm help.помогает. InВ itsего originalоригинальном paper,описание, itпредполагается, was hypothesized thatчто batchnorm isсокращает reducingвнутренее internalковариантное covariateсмещение. shift.Недавно, Recently,было itпоказано, wasчто shownэто thatне thatобязательно isправда. notЛучшее necessaryна true.сегодняшний Theдень bestобъяснение up-to-dateто, explanation is thatчто batchnorm makesделает optimizationоптимизационные landscapeсглаживания, smooth,которые thusделают makingобучение gradientградиентным descentспуском trainingэффективнее. moreЧто, efficient.в This,свою inочередь, itsпозволяет turn,ускорить allowsпроцесс usingобучение higherс learning rates than withoutпомощью batchnorm!
ImplementingРеализация batchnorm
WeМы willвоспользуемся baseкодом ourприведенным effortв on the code previously introduced on Dayдне 2. First,Первое, weмы willпереопределим redefinedструктура theдынных Layer dataсделав structureего makingболее it more granular:детализированным:
data Layer a = -- Linear layer with weights and biases
Linear (Matrix a) (Vector a)
-- Same as Linear, but without biases
| Linear' (Matrix a)
-- Batchnorm with running mean, variance, and two
-- learnable affine parameters
| Batchnorm1d (Vector a) (Vector a) (Vector a) (Vector a)
-- Usually non-linear element-wise activation
| Activation FActivation
Amazing!Превосходно! NowТеперь weмы canможем distinguishотделить betweenнесколько severalтипов kindsслоев: of layers: affine (linear)родственный(линейный), activation,активационный andи batchnorm. SinceТак как batchnorm alreadyуже compensatesкомпенсирует forсмещения, aнам bias,не weнужно doиспользовать notсмещения actuallyна needпоследующих biasesслоях. inПоэтому theмы subsequent linear layers. That is why we define aопределяем Linear'Linearlayerслой withoutбез biases.смещений. WeТак alsoже extendрасширим Gradients toдля accommodateиспользования ourновой newструктуры layers structure:слоёв:
data Gradients a = -- Weight and bias gradients
LinearGradients (Matrix a) (Vector a)
-- Weight gradients
| Linear'Gradients (Matrix a)
-- Batchnorm parameters and gradients
| BN1 (Vector a) (Vector a) (Vector a) (Vector a)
-- No learnable parameters
| NoGrad
Next,Теперь, weмы wantхотим toрасширить extendфункцию theраспространения neuralнейронной network propagation functionсети _pass, dependingв onзависимости theот layer.слоя. ThatЭто isпроще easyвсего withсделать patternс matching.помощью Hereс isсопоставления howс weобразцом. matchВот theкак мы это сделаем в Batchnorm1d layerслое andи itsего parameters:параметрах:
_pass inp (Batchnorm1d mu variance gamma beta:layers)
= (dX, pred, BN1 batchMu batchVariance dGamma dBeta:t)
where
AsКак previously,и theраньше, _pass functionфункция receivesполучает an input inp and layer parameters. The second argument is the pattern we are matching against, making our algorithm specific in this case forввод (Batchnorm1Dinp...).и Weпараметры willслоя. alsoВторой specifyаргумент это образец с который мы и проводим сопоставление, создавая наш алгоритм, в данном случае, Batchnorm1D. Мы также указываем _pass forдля otherдругих kindsвидово ofслоев. Layer.Отсуда, Thus,мы weполучаем haveполиморфную obtainedфункцию a_pass polymorphicдля _passкаждого слоя. Наконец, результат выражения является кортеж: градиенты для обратного распространения function with respect to the layers. Finally, the equation results in a tuple of three: gradients to back propagatedXdX, predictionsпредсказание predpred и дополнительные данные t с вычисленными значениями BN1 в этом слое(средний пакет batchMu, andраспределение prependedbatchVariance listи twithпараметры valuesBN1computedградиентов inдля this layer (batch meanbatchMu, variance batchVariance`, and learnable parameters gradients)обучения).
TheСледующий forwardшаг passпоказан as illustrated in this post:ниже:
-- Forward
eps = 1e-12
b = br (rows inp) -- Broadcast (replicate) rows from 1 to batch size
m = recip $ (fromIntegral $ rows inp)
-- Step 1: mean from Equation (1)
batchMu :: Vector Float
batchMu = compute $ m `_scale` (_sumRows inp)
-- Step 2: mean subtraction
xmu :: Matrix Float
xmu = compute $ inp .- b batchMu
-- Step 3
sq = compute $ xmu .^ 2
-- Step 4: variance, Equation (2)
batchVariance :: Vector Float
batchVariance = compute $ m `_scale` (_sumRows sq)
-- Step 5
sqrtvar = sqrtA $ batchVariance `addC` eps
-- Step 6
ivar = compute $ A.map recip sqrtvar
-- Step 7: normalize, Equation (3)
xhat = xmu .* b ivar
-- Step 8: rescale
gammax = b gamma .* xhat
-- Step 9: translate, Equation (4)
out0 :: Matrix Float
out0 = compute $ gammax .+ b beta
AsОбсуждая discussedв onстатье Day"День 2,2", thereмы isповторяли aвызов recurrentполучения callградиентов obtainingследующего gradientsслоя, fromнейронная theсеть nextпредсказывала layer,pred neuralи networkвычисляла predictionзначение predхвоста and computed values tail t:t:
(dZ, pred, t) = _pass out layers
IЯ preferпредпочитаю toхранить keepобратную theпередачу backwardбез passупрощений. withoutЭто anyпомогает simplifications.прояснить Thatкакой makesиз clearшагов whichза stepчто corresponds to which:отвечает:
-- Backward
-- Step 9
dBeta = compute $ _sumRows dZ
-- Step 8
dGamma = compute $ _sumRows (compute $ dZ .* xhat)
dxhat :: Matrix Float
dxhat = compute $ dZ .* b gamma
-- Step 7
divar = _sumRows $ compute $ dxhat .* xmu
dxmu1 = dxhat .* b ivar
-- Step 6
dsqrtvar = (A.map (negate. recip) (sqrtvar .^ 2)) .* divar
-- Step 5
dvar = 0.5 `_scale` ivar .* dsqrtvar
-- Step 4
dsq = compute $ m `_scale` dvar
-- Step 3
dxmu2 = 2 `_scale` xmu .* b dsq
-- Step 2
dx1 = compute $ dxmu1 .+ dxmu2
dmu = A.map negate $ _sumRows dx1
-- Step 1
dx2 = b $ compute (m `_scale` dmu)
dX = compute $ dx1 .+ dx2
NoteЧасто, thatнам oftenнужно weпроизвести needоперации toтипа performвычитания operations like mean subtractionсреднего X−μ, whereгде, inна practiceпрактике, weу haveнас aесть matrixматрица X andи a vectorвектор μ. HowКак doвычесть youвектор subtractиз aматрицы? vectorПравильно, fromникак. aВычитать matrix?можно Right,только you2 don't.матрицы. YouТакие canбиблиотеки subtractкак onlyNumpy twoмогут matrices.говорить Librariesо likeмагии, Numpyкоторая mayупростит haveпревращение aвектора broadcastingв magicматрицу. thatЭто wouldможет implicitlyбыть convertполезно, aно vectorможет toвыявить aразличные matrix5.виды Thisбагов. broadcastingМы mightже beвзамен useful,произведем butявное mightпреобразование alsoвектора obscureв differentматрицу. kindsДля ofнаших bugs.нужд, Weмы insteadимеем perform explicit vector to matrix transformations. For our convenience, we have a shortcutскращение b = br (rows inp), thatкоторое willмы expandрасширим aвектор vectorна toто theже sameчисло numberрядов ofкак rowsв asinp. inГде inp. Where functionфункция br ('broadcast') is::
br rows' v = expandWithin Dim2 rows' const v
HereЭто isпример anтого, exampleка howкработае brbr. works.Для First,начала, weинтерактивно startзапустим anсессию interactiveи Haskellзагрузим session and loadмодуль NeuralNetwork.hs module::
$ stack exec ghci
GHCi, version 8.2.2: http://www.haskell.org/ghc/ :? for help
Prelude> :l src/NeuralNetwork.hs
Then,Затем we testпроверим br functionфункцию onна a vectorвекторе [1, 2, 3, 4]:
*NeuralNetwork> let a = A.fromList Par [1,2,3,4] :: Vector Float
*NeuralNetwork> a
Array U Par (Sz1 4)
[ 1.0, 2.0, 3.0, 4.0 ]
*NeuralNetwork> let b = br 3 a
*NeuralNetwork> b
Array D Seq (Sz (3 :. 4))
[ [ 1.0, 2.0, 3.0, 4.0 ]
, [ 1.0, 2.0, 3.0, 4.0 ]
, [ 1.0, 2.0, 3.0, 4.0 ]
]
As we can see, a new matrix with three identical rows has been obtained. Note that a has type Array U Seq, meaning that data are stored in an unboxed array. Whereas the result is of type Array D Seq, a so-called delayed array. This delayed array is not an actual array, but rather a promise to compute6 an array in the future. In order to obtain an actual array residing in memory, use compute:
*NeuralNetwork> compute b :: Matrix Float
Array U Seq (Sz (3 :. 4))
[ [ 1.0, 2.0, 3.0, 4.0 ]
, [ 1.0, 2.0, 3.0, 4.0 ]
, [ 1.0, 2.0, 3.0, 4.0 ]
]
You will find more information about manipulating arrays in massiv documentation. Similarly to br, there exist several more convenience functions, rowsLike and colsLike. Those are useful in conjunction with _sumRows and _sumCols:
-- | Sum values in each column and produce a delayed 1D Array
_sumRows :: Matrix Float -> Array D Ix1 Float
_sumRows = A.foldlWithin Dim2 (+) 0.0
-- | Sum values in each row and produce a delayed 1D Array
_sumCols :: Matrix Float -> Array D Ix1 Float
_sumCols = A.foldlWithin Dim1 (+) 0.0
Here is an example of _sumCols and colsLike when computing softmax activation 
softmax :: Matrix Float -> Matrix Float
softmax x =
let x0 = compute $ expA x :: Matrix Float
x1 = compute $ (_sumCols x0) :: Vector Float
x2 = x1 `colsLike` x
in (compute $ x0 ./ x2)
Note that softmax is different from element-wise activations. Instead, softmax acts as a fully-connected layer that receives a vector and outputs a vector. Finally, we define our neural network with two hidden linear layers and batch normalization as:
let net = [ Linear' w1
, Batchnorm1d (zeros h1) (ones h1) (ones h1) (zeros h1)
, Activation Relu
, Linear' w2
, Batchnorm1d (zeros h2) (ones h2) (ones h2) (zeros h2)
, Activation Relu
, Linear' w3
]
```haskell
The number of inputs is the total number of `28×28=784`
image pixels and the number of outputs is the number of classes (ten digits). We randomly generate the initial weights `w1`, `w2`, and `w3`. And set initial batchnorm layer parameters as follows: means to zeroes, variances to ones, scaling parameters to ones, and translation parameters to zeroes:
```haskell
let [i, h1, h2, o] = [784, 300, 50, 10]
(w1, b1) <- genWeights (i, h1)
let ones n = A.replicate Par (Sz1 n) 1 :: Vector Float
zeros n = A.replicate Par (Sz1 n) 0 :: Vector Float
(w2, b2) <- genWeights (h1, h2)
(w3, b3) <- genWeights (h2, o)
Remember that the number of batchnorm parameters equals to the number of neurons. It is a common practice to put batch normalization before activations, however this sequence is not strict: one can put batch normalization after activations too. For comparison, we also specify a neural network with two hidden layers without batch normalization.
let net2 = [ Linear w1 b1
, Activation Relu
, Linear w2 b2
, Activation Relu
, Linear w3 b3
]
In both cases the output softmax activation is omitted as it is computed together with loss gradients in the final recursive call in _pass:
_pass inp [] = (loss', pred, [])
where
pred = softmax inp
loss' = compute $ pred .- tgt
Here, [] on the left-hand side signifies an empty list of input layers, and [] on the right-hand side is the empty tail of computed values in the beginning of the backward pass.
The complete project is available on Github. I recommend playing with different neuron networks architectures and parameters. Have fun!
Batchnorm Pitfalls
There are several potential traps when using batchnorm. First, batchnorm is different during training and during inference. That makes your implementation more complicated. Second, batchnorm may fail when training data come from different datasets. To avoid the second pitfall, it is essential to ensure that every batch represents the whole dataset, i.e. it has data coming from the same distribution as the machine learning task you are trying to solve. Read more about that.
Summary
Despite its pitfalls, batchnorm is an important concept and remains a popular method in the context of deep neural networks. Batchnorm's power is that it can substantially reduce the number of training epochs or even help achieving better neural network accuracy. After discussing this, we are prepared for such hot subjects as convolutional neural networks and reinforcement learning. Stay tuned!
AI And Neural Networks
- Richard Sutton. The Bitter Lesson
- Using neural nets to recognize handwritten digits
- Batch normalization paper
- How Does Batch Normalization Help Optimization?
- On The Perils of Batch Norm